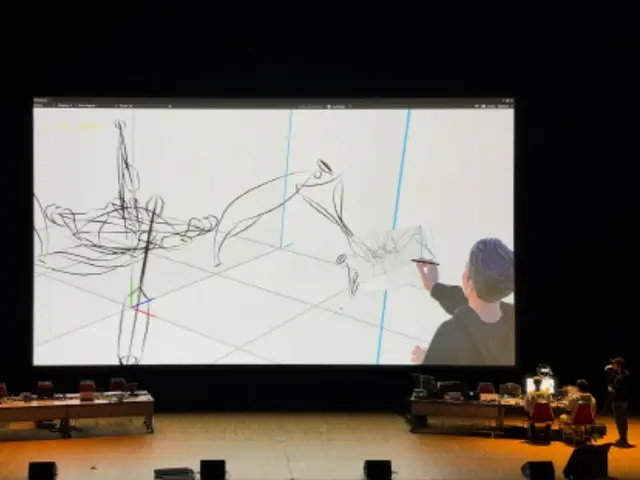
เมื่อไซเนอร์ควบคุมคอนโทรลเลอร์ หุ่นยนต์คล้ายแมงมุมที่เคลื่อนไหวได้ก็ยืนขึ้น แก้ไขท่าทางของมันให้เป็นหุ่นยนต์ฮิวแมนนอยด์สองเท้า และเริ่มเดินโดยใช้ขาทั้งสองข้าง ” (2024
SIGGRAPH Asia Real-time Live KAIST Robot Sketch Demo Scene) สถาบันวิทยาศาสตร์และเทคโนโลยีขั้นสูงแห่งเกาหลี (KAIST) จัดงาน “S
พัฒนาโดยทีมวิจัยภาควิชาการออกแบบอุตสาหกรรมของศาสตราจารย์ Bae Seok-hyun และทีมวิจัยภาควิชาวิศวกรรมเครื่องกลของ Hwang Bo-Jae-min แบบเรียลไทม์ที่ IGGRAPH Asia 2024
มีการประกาศว่าเทคโนโลยี ``RobostSketch'' ได้รับรางวัล Best Jury Award "SIGGRAPH Real-time Live" เป็นคอมพิวเตอร์กราฟิกส์
เป็นที่รู้จักกันในชื่อ ``เวทีแห่งความฝัน'' ในสาขาที่มีการโต้ตอบและโต้ตอบ ทุกปี จะมีเพียงประมาณ 10 เทคโนโลยีที่เป็นนวัตกรรมที่คัดเลือกมาอย่างดีจากทั่วโลกเท่านั้นที่ได้รับอนุญาตให้ยืนหยัดบนเวทีนี้ได้
การสาธิตทั้งหมดจะดำเนินการแบบเรียลไทม์โดยไม่ต้องบันทึกล่วงหน้า และจะต้องแสดงให้เห็นถึงความแปลกใหม่และศักยภาพของเทคโนโลยีภายในระยะเวลาที่จำกัด 6 นาที ภาพร่างหุ่นยนต์ของ KAIST คือ
ในขั้นตอนนี้ บริษัทได้แสดงให้เห็นถึงศักยภาพของกระบวนการออกแบบหุ่นยนต์แบบใหม่ ได้รับความสนใจอย่างมาก และได้รับรางวัล Best Jury Award ซึ่งมอบให้กับเทคโนโลยีเดียวเท่านั้น
Robot Sketch เป็นมากกว่าเครื่องมือออกแบบที่แสดงออกถึงรูปลักษณ์และโครงสร้างที่มองเห็นได้ โดยผสมผสานภาพร่าง 3 มิติเข้ากับ generative AI
เทคโนโลยีที่เป็นนวัตกรรมซึ่งกำหนดแนวคิดใหม่ของการออกแบบหุ่นยนต์โดยการรวม VR ที่ดื่มด่ำเข้าด้วยกัน นักออกแบบใช้แท็บเล็ตและปากกาเพื่อแสดงโครงสร้างที่เชื่อมต่อกันที่ซับซ้อนในสภาพแวดล้อม VR ได้อย่างเป็นธรรมชาติ
คุณสามารถตรวจสอบขนาดจริงได้ หุ่นยนต์ของนักออกแบบได้เรียนรู้วิธีเดินและเคลื่อนไหวภายในแบบจำลองที่เป็นไปตามฟิสิกส์ในโลกแห่งความเป็นจริงผ่านการเรียนรู้แบบเสริมกำลัง นี่คือมัน
นักออกแบบสามารถสร้างการออกแบบหุ่นยนต์ที่สามารถใช้งานในโลกแห่งความเป็นจริงในพื้นที่ VR เคลื่อนย้ายหุ่นยนต์ได้โดยตรง และประเมินความเป็นธรรมชาติและความเสถียรของการเคลื่อนไหวแบบเรียลไทม์
การร่างหุ่นยนต์เสร็จสมบูรณ์ด้วยความร่วมมือระหว่างทีมวิจัยของศาสตราจารย์ Bae และทีมวิจัยของศาสตราจารย์ Hwang ผู้เชี่ยวชาญด้านการร่างภาพ 3 มิติ ศาสตราจารย์เบกล่าวว่า `` หุ่นยนต์แห่งอดีต
"เราต้องการเอาชนะข้อจำกัดของการออกแบบหุ่นยนต์และสร้างเครื่องมือที่ช่วยให้นักออกแบบหุ่นยนต์สามารถแสดงทุกสิ่งที่พวกเขาจินตนาการได้แบบเรียลไทม์"
นอกจากนี้ ``การออกแบบหุ่นยนต์ไม่ได้เกี่ยวกับรูปลักษณ์ภายนอกเท่านั้น แต่ยังเกี่ยวกับการเคลื่อนไหว ฟังก์ชัน และของหุ่นยนต์ด้วย
เป็นกระบวนการที่รวมถึงการโต้ตอบกับผู้ใช้ อำนวยความสะดวกในการสื่อสารที่ราบรื่นระหว่างนักออกแบบหุ่นยนต์และวิศวกรหุ่นยนต์ ซึ่งช่วยลดเวลาและต้นทุนในการสร้างต้นแบบในโลกแห่งความเป็นจริงได้อย่างมาก
"แบบร่างหุ่นยนต์ที่สามารถลดความกว้างได้จะกลายเป็นเครื่องมือสำคัญในการพัฒนาหุ่นยนต์และกระบวนการเชิงพาณิชย์ในอนาคต"
2024/12/10 05:57 KST
Copyrights(C) Herald wowkorea.jp 104